Tipps zur Lösung der Roboter-Aufgaben: Sensoren nutzen
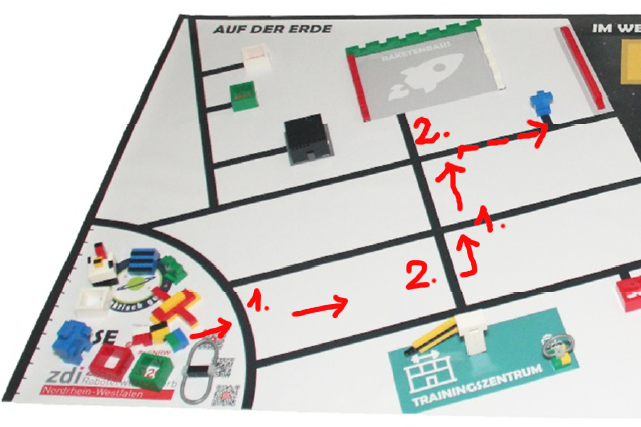
pIn der Aufgabe 4 Autonomes Taxi
soll unter anderem die kleine blaue Figur in die Raumstation gebracht werden. Hier kann man nun lange damit experimentieren, wie lange oder wie viele Umdrehungen der Roboter fahren soll, um zu der blauen Figur zu kommen. /ppEinfacher geht es, wenn man die Sensoren verwendet!/p
pVerwendet werden hier die Aufgabenstellung und das Spielfeld des zdi-Roboterwettbewerbs 20192020. Die Nutzung erfolgt mit freundlicher Genehmigung der zdi-Landesgeschäftsstelle (zdi-LGS). © zdi-LGS. Quelle Bilder unten: LEGO Mindstorms Programm Screenshot<p>
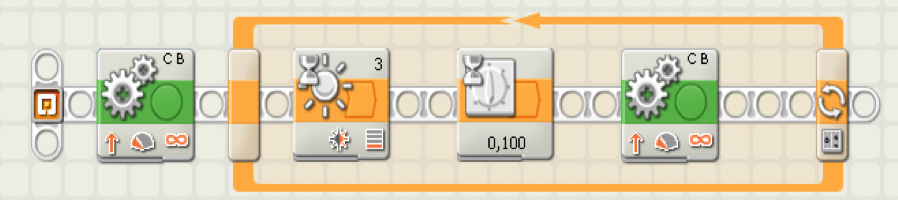
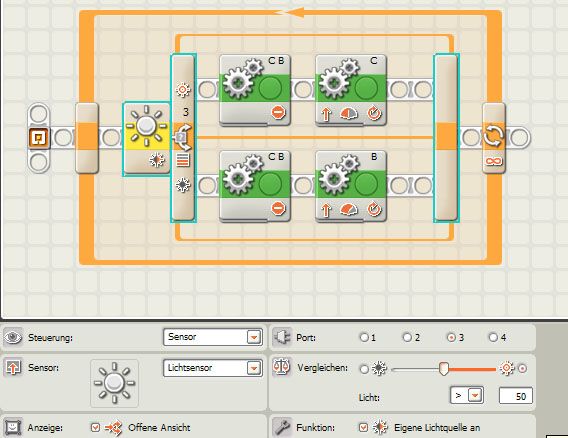
pstrongExakter steuern mit Linienerkennung:/strong/ppDer Roboter könnte zum Beispiel zur Lösung dieser Aufgabe von der Base aus bis zur 2. schwarzen Linie fahren. (Er muss ja beim Start KOMPLETT in der Base sein, deshalb ist die Begrenzung der Base die erste Linie)/ppDie schwarze Linie hat häufig einen Lichtwert von <40. Evtl. müsst ihr den Wert erst messen./p