Um die Lizenzinformationen zu sehen, klicken Sie bitte den gewünschten Inhalt an.
Name:
Verkabelung
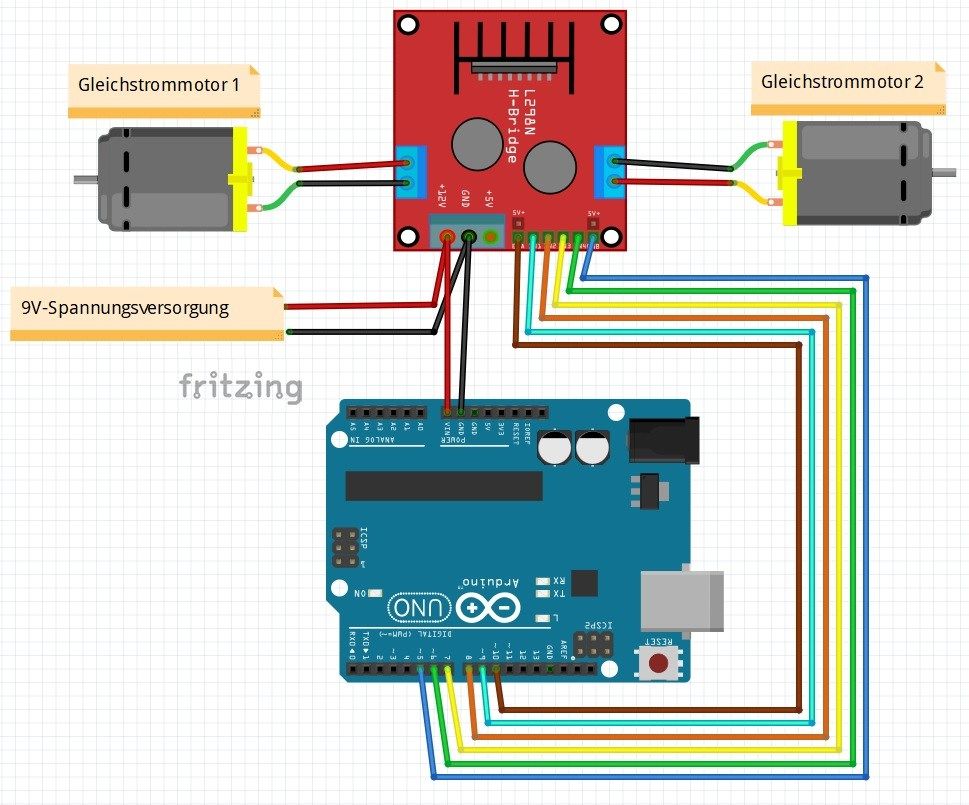
Das Arduino-Auto hat zwei Gleichstrom-Getriebemotoren, die über eine H-Brücke (L298n) gesteuert werden. Diese sind mit dem Arduino Uno wie in der Abbildung verbunden. So können die Räder vorwärts und rückwärts und in einer gewählten Geschwindigkeit drehen.Zur Programmierung soll hier NEPO. https://lab.open-roberta.org Einsatz kommen.
Programmierung
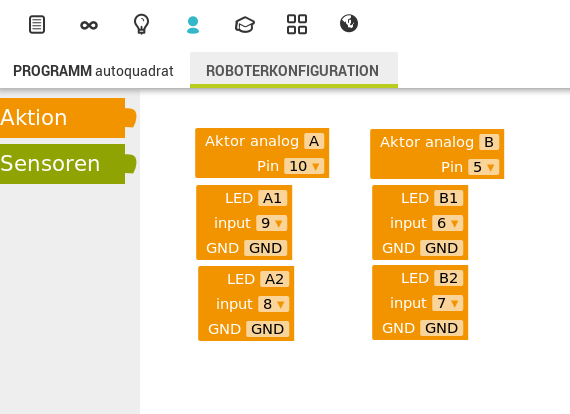
Roboterkonfiguration
Momentan bietet OpenRoberta noch keine direkte Einbindung eines L298n Bausteins. Dieser kann jedoch über einen Umweg mit Hilfe von LEDs und zwei analogen Aktoren einfach eingebunden werden. Im Bild rechts wird eine mögliche Roboterkonfiguration dargestellt.
Die PIN Belegung richtet sich hierbei nach der Belegung aus dem obigen Fritzing.
Steuerung der Motoren
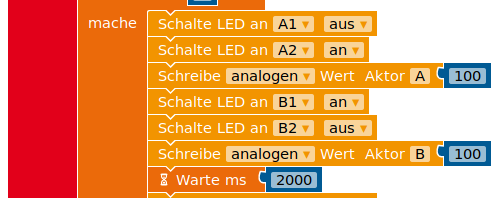
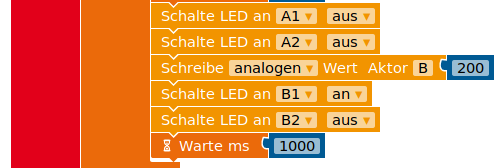
geradeaus fahren
A1A2 B1B2 bestimmen die Dreh-Richtung der Räder
(kann ausprobiert werden)
analoge Werte liegt zwischen 0 und 255 und bestimmen die Geschwindigkeit. Der Warteblock bestimmt die Reichweite.
A1A2 B1B2 bestimmen die Dreh-Richtung der Räder
(kann ausprobiert werden)
analoge Werte liegt zwischen 0 und 255 und bestimmen die Geschwindigkeit. Der Warteblock bestimmt die Reichweite.
Kurve fahren:
ein Rad fährt nicht, oder viel langsamer,
ein Rad fährt nicht, oder viel langsamer,
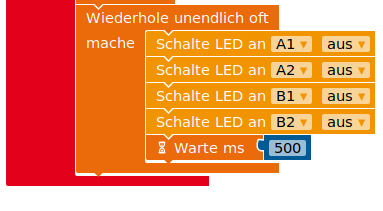
anhalten - alle LED ausschalten in Endlosschleife


